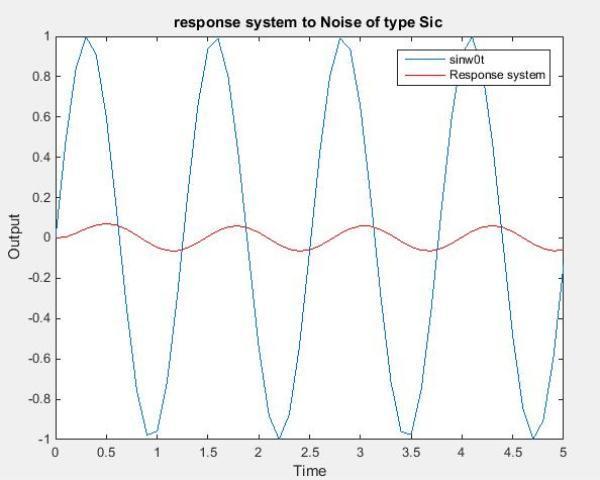
در اين پروژه براي مدل تابع تبديل کنترل کلاسيک، کنترل مدرن و کنترل بهينه در دو حالت زمان پيوسته و زمان گسسته طراحي شده است. ابتدا کنترل PID پيوسته طراحي شده و سپس PID ديجيتال و سپس رفتار سيستم نسبت به دو حالت مقايسه شده و در مرحله بعد کنترل فيدبک حالت و مشاهده گر و کنترل فيدبک با مشاهده گر طراحي شده و همچنين حالت هاي سيستم را با مشاهده گر مقايسه شده اند و تاثير نويز و تغيير پارامتر ها روي رفتار سيستم بررسي شده است. سپس کنترل فيدبک حالت زمان گسسته، مشاهده گر آن و کنترل فيدبک حالت زمان گسسته همراه با مشاهده گر طراحي شده اند و حالت هاي سيستم را با مشاهده گر مقايسه شده اند. اثر نويز و تغيير پارامترها را روي اين طراحي ها بررسي شده است و در آخر کنترل فيدبک حالت بهينه با تابع هزينه دلخواه طراحي شده است و رفتار سيستم با اين طراحي را در حضور نويز بررسي شده است. نتيجه اي که گرفته ايم اين است که کنترل PID در حذف نويز از ساير طراحي ها موفق تر بوده و کنترل فيدبک حالت نسبت به تغيير پارامترهاي سيستم مقاوم تر بوده و از نظر سرعت رسيدن به حالت مانا، SVFC سريع ترين پاسخ را داشته است.
پروژه طراحي کنترلر کلاسيک، کنترل مدرن و کنترل بهينه براي مدل تابع تبديل در حالت هاي زمان پيوسته و زمان گسسته و مقايسه آنها در محيط کد نويسي در MATLAB، مشتمل بر 57 صفحه، تايپ شده، به همراه روابط رياضي و تصاوير با فرمت pdf جهت دانلود قرار داده شده و به ترتيب زير گردآوري شده است:

جهت دانلود پروژه طراحي کنترلر ، کنترل مدرن و کنترل بهينه براي مدل تابع تبديل در حالت هاي زمان پيوسته و زمان گسسته و مقايسه آنها در محيط کد نويسي نرم افزار Matlab به لينک زير مراجعه نماييد:

درباره این سایت