اگر شما وقتي مقابل جمع مي خواهيد صحبت کنيد مي ترسيد و اعتماد به نفس کافي نداريد و نمي توانيد پيام و مطلب خود را به خوبي منتقل کنيد و يا اگر دانشجو هستيد و مي خواهيد کنفرانس دهيد و يا مي خواهيد از پايان نامه خود دفاع کنيد و يا کارمند يا مدير هستيد و مي خواهيد در جلسه در مقابل همکاران يا مافوق گزارش دهيد و بلد نيستيد و مي ترسيد و … اين کتاب به شما کمک مي کند که وقتي در مقابل جمع قرار گرفتيد بدون هيچ گونه ترسي و با اعتماد به نفس بالا مطلب و پيام خود را به بهترين وجه ممکن منتقل کنيد و با کمک تکنيک ها و مهارت هايي که در اين کتاب خواهيد آموخت کاملا حرفه اي به نظر برسيد و حتي از اساتيد و مديران خود فراتر رويد و در بين جمع کاملا بدرخشيد. کتاب نحوه ارائه کنفرانس و دفاع از پايان نامه کتابي است که بطور عام در خصوص مهارت ارائه مطلب مي باشديعني اينکه چگونه بتوانيم مطلب و محتواي خودمان را به بهترين نحو ارائه کنيم و پيام خود را منتقل کنيم اگر کارمند يا مدير هستيم بتوانيم در جلسه اداري يا کنفرانس ها و سمينارهاي اداري مطلب خودمان را بخوبي ارائه کنيم و يا اگر معلم يا مدرس دانشگاه هستيم بتوانيم به نحو مطلوب محتواي آموزشي خودمان را ارائه کنيم. اما اين کتاب در عين حال که يک کتاب عام و عمومي براي ارائه مطلب است يک کتاب خاص و عالي براي دانشجوياني است که مي خواهند کنفرانس دهند و يا از پايان نامه خود دفاع کنند و يا مي خواهند در آينده سخنران هاي خوبي گردند.

کتاب نحوه ارائه کنفرانس و دفاع از پروژه و پايان نامه، مشتمل بر 5 فصل، 29 صفحه، به زبان فارسي، با فرمت pdf، به ترتيب زير گردآوري شده است:
فصل 1: مديريت جلسه و خود مديريتي
فصل 2: شناخت داور
فصل 3: لحن و بيان مناسب
فصل 4: تمرين و آمادگي نهايي
فصل 5: چند اشتباه متداول در ارائه دانشجويي
جهت دانلود کتاب نحوه ارائه کنفرانس و دفاع از پروژه و پايان نامه، به لينک زير مراجعه نماييد:
کتاب نحوه ارائه کنفرانس و دفاع از پروژه
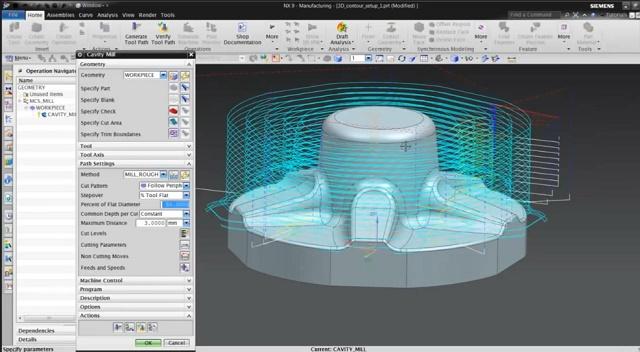
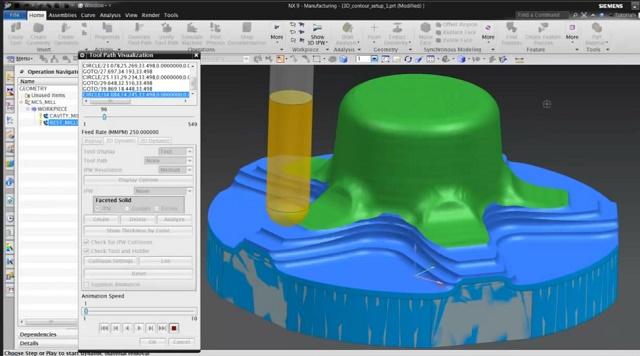
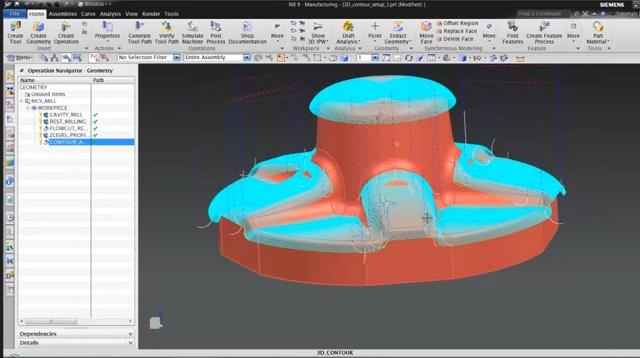
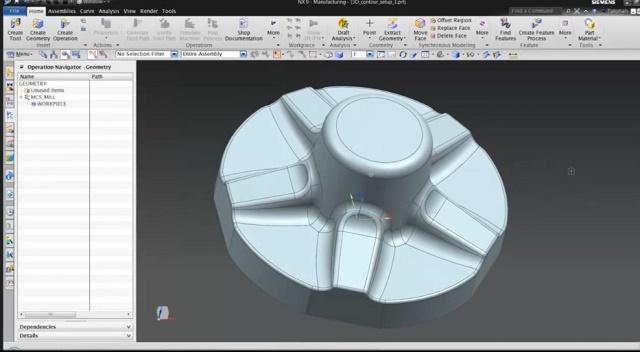
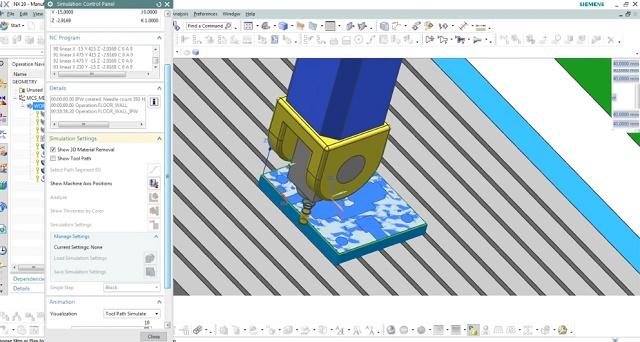
Contour Machining is Machining Irreqular shaped surface. Contoured Surfaces are non prismatic or planar shapes. these contoured surfaces require a different approach to machining.
در اين ويدئو آموزشي،ماشينکاري سه بعدي کانتور (3D Contour Machining) قطعه زير در نرم افزار NX CAM به صورت گام به گام (29 دقيقه با کيفيت عالي)، به کاربر به ترتيب زير آموزش داده مي شود:
توجه: فايل آموزش ماشينکاري سه بعدي کانتور (3D Contour Machining) بصورت کاملا تصويري، قدم به قدم و به زبان انگليسي مي باشد. در اين کليپ آموزشي به گوشه اي از توانمندي هاي نرم افزار زيمنس ان ايکس پي خواهيد برد.
توجه: جهت سهولت در دانلود، فايل به سه بخش تقسيم شده است. پس از دانلود کامل سه بخش آن ها را در داخل يک فولدر قرار داده و سپس با کليک راست بر روي بخش اول گزينه extract here را انتخاب نماييد. سپس فايل از حالت فشرده خارج شده و مي توانيد به راحتي استفاده نماييد.
جهت دانلود آموزش ماشينکاري سه بعدي کانتور (Contour Machining) در نرم افزار NX CAM، به لينک زير مراجعه نماييد:
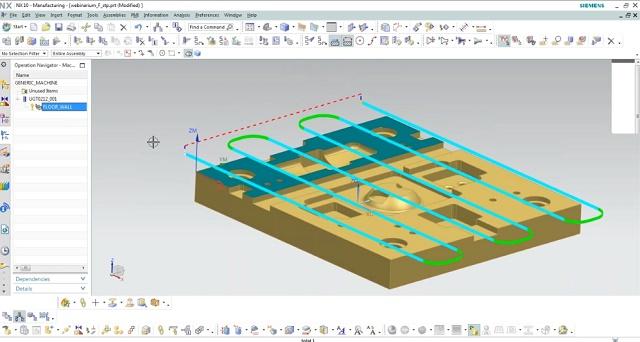
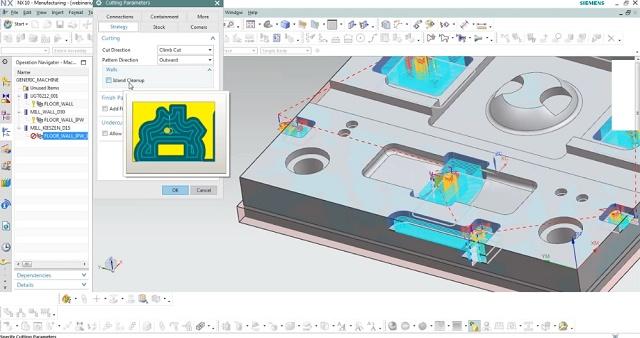
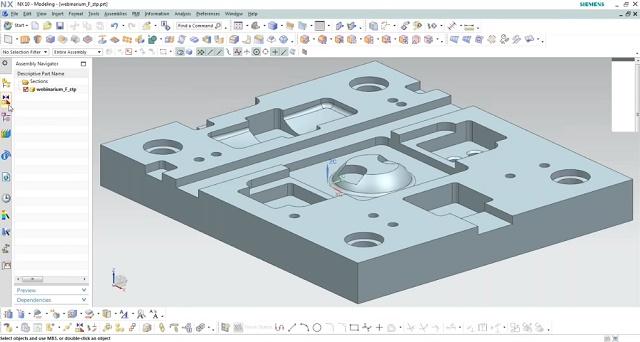
در اين ويدئو آموزشي،ماشينکاري فرزکاري (Milling Machining) قطعه زير در نرم افزار NX CAM به صورت گام به گام (63 دقيقه با کيفيت عالي)، به کاربر به ترتيب زير آموزش داده مي شود:
توجه: فايل آموزش ماشينکاري فرزکاري (Milling Machining) بصورت کاملا تصويري، قدم به قدم و به زبان لهستاني مي باشد. در اين کليپ آموزشي به گوشه اي از توانمندي هاي نرم افزار زيمنس ان ايکس نيز پي خواهيد برد.
توجه: جهت سهولت در دانلود، فايل به چهار بخش تقسيم شده است. پس از دانلود کامل چهار بخش آن ها را در داخل يک فولدر قرار داده و سپس با کليک راست بر روي بخش اول گزينه extract here را انتخاب نماييد. سپس فايل از حالت فشرده خارج شده و مي توانيد به راحتي استفاده نماييد.
جهت دانلود آموزش ماشينکاري فرزکاري (Milling Machining) در نرم افزار NX CAM، به لينک زير مراجعه نماييد:
کتاب طراحي و نقشه کشي لوله در واقع يک دستورالعمل گام به گام را براي طراحان، نقشه کش ها و دانشجوياني که با دياگرام هاي جريان، آرايش لوله ها و نقشه هاي ايزومتريک سر و کار دارند فراهم مي آورد. اين کتاب شامل دستور العمل هايي براي طراحي بهتر علائم فيتينگ ها، فلنج ها، شيرها و تجهيزات مکانيکي که در اکثر نقشه هاي لوله کشي به کار مي رود مي باشد. در اين کتاب بيش از 350 تصوير و عکس، مثال ها و دستورالعمل هاي بصري را ارائه مي دهد.

کتاب طراحي و نقشه کشي لوله(Pipe Drafting and Design)، مشتمل بر 15 فصل، 471 صفحه، به زبان انگليسي، همراه با تصاوير، با فرمت pdf، به ترتيب زير گردآوري شده است:
جهت دانلود کتاب طراحي و نقشه کشي لوله(Pipe Drafting and Design)، به لينک زير مراجعه نماييد:
امروزه ساختمان ها به تدريج در حال افزايش ارتفاع هستند و در نتيجه يافتن راه حل مناسب براي اتصال سيستم هاي تاسيساتي به سازه به عنوان مشکلي جدي براي مهندسين تبديل گشته است. تاثير تغيير طول حرارتي لوله ها که باعث جابه جايي آن ها درون سازه يا زير سقف مي گردد، علاوه بر تاثيرات وزني آن ها، انقباض سازه در اثر مرور زمان (تاثيرات تغيير طول)، روش هاي پايدارسازي در برابر بارهاي لرزه اي و تمامي موارد مشابه مورد نظر قرار گرفته اند. کتاب مهندسي و طراحي آويز لوله مربوط به شرکت ANVIL است که احتمالا شناخته شده ترين شرکت در زمين? ساخت آويز لوله (Hanger) مي باشد. اين کتاب با زباني ساده و روان طراحي آويز را آموزش مي دهد، همچنين بسياري از مطالب آن حالت عمومي داشته و تحليل تنش و طراحي ساپورت را هم شامل مي شود.

کتاب مهندسي و طراحي آويز لوله(Pipe Hanger Design & Engineering)، مشتمل بر 81 صفحه، به زبان انگليسي، همراه با تصاوير و جداول، با فرمت pdf، به ترتيب زير گردآوري شده است:
جهت دانلود کتاب مهندسي و طراحي آويز لوله(Pipe Hanger Design & Engineering)، به لينک زير مراجعه نماييد:
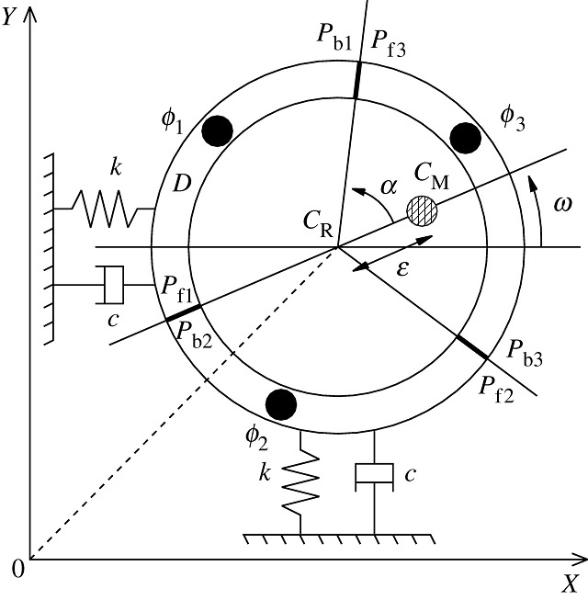
در اين مقاله با انتخاب يک روتور صفحه اي جفکات به عنوان ماشين دوار، معادلات حاکم بر حرکت روتور و پاسخ سيستم دوار به نابالانسي و خم استاتيکي موجود در آن (شامل دامنه و فاز پاسخ) استنتاج مي شوند. در ادامه با بکارگيري يک بالانسر رينگ و گلوله به عنوان اتوبالانسر انفعالي بر روي ماشين دوار، به استنتاج معادلات حرکت، تحليل پايداري و بدست آوردن پاسخ هاي زماني سيستم پرداخته مي شود. تحليل پايداري سيستم حول وضعيت هاي تعادل آن براي اتوبالانسري با يک و دو گلوله، بر اساس معيار روت هاويتز انجام شده است. پاسخ هاي زماني سيستم در جهت تاييد تحليل پايداري انجام گرفته، ارائه شده است.

مقاله بالانس اتوماتيک ماشين هاي دوار با استفاده از يک سيستم بالانس کننده انفعالي و تعيين محدوده هاي پايدار آن، مشتمل بر 8 صفحه، به زبان فارسي، تايپ شده، به همراه تصاوير، دياگرام، فرمول ها و روابط رياضي با فرمت pdf، به ترتيب زير گردآوري شده است:
جهت دانلود مقاله بالانس اتوماتيک ماشين هاي دوار با استفاده از يک سيستم بالانس کننده انفعالي و تعيين محدوده هاي پايدار آن، به لينک زير مراجعه نماييد:
امروزه براي انتقال قدرت از يک شافت به شافت ديگر، کوپلينگ ها به کثرت مورد استفاده قرار مي گيرند. در اين رابطه، بررسي مکانيزم حرکت آنها و شبيه سازي آن از اهميت ويژه اي برخوردار است. يکي از انواع کوپلينگ هايي که کاربردهاي فراواني دارد، کوپلينگ يونيورسال مي باشد. در اين مقاله ابتدا مقداري راجع به اين نوع کوپلينگ ها و تئوري حرکت آنها صحبت مي شود، سپس به کمک نرم افزار Working Model مکانيزم حرکت آنها شبيه سازي گرديده و نتايج بدست آمده مورد تجزيه و تحليل قرار مي گيرد.

مقاله بررسي کوپلينگ هاي يونيورسال و شبيه سازي مکانيزم آنها به کمک نرم افزار Working Model، مشتمل بر 8 صفحه، به زبان فارسي، تايپ شده، به همراه تصاوير، دياگرام، فرمول ها و روابط رياضي با فرمت pdf، به ترتيب زير گردآوري شده است:

جهت دانلود مقاله بررسي کوپلينگ هاي يونيورسال و شبيه سازي مکانيزم آنها به کمک نرم افزار Working Model، به لينک زير مراجعه نماييد:
زماني که بر روي يک سطح صاف قرار مي گيريد، وظيفه سيستم تعليق (فنربندي) خودرو، کار آساني به نظر مي رسد. اما اگر سرعت گيرها کمتر به شما ضربه وارد کنند آن وقت متوجه مي شويد که اهميت سيستم تعليق چيست. حقيقت اين است که سيستم تعليق خودرو حجم کار زيادي را در خودرو به دوش دارد. هر قطعه اين سيستم بيشتر از هر عضو ديگري فشار را تحمل مي کند. سيستم تعليق يا فنربندي خودرو ميان بدنه و چرخ هاي خودرو قرارگرفته است و به منظور برآورده کردن اهداف مهمي در خودرو به کارگرفته مي شود. در حالت ايده آل، يک سيستم تعليق مناسب و سالم، ضربات و ديگر ناهمواري هاي جاده را جذب مي کند. به اين ترتيب ضربه اثري بر کابين داخلي خودرو نداشته و سرنشينان با آرامش بيشتري به مسير ادامه مي دهند. اين ويژگي سيستم تعليق، از ديدگاه مسافر اهميت بسيار بالايي دارد، درحالي که ممکن است راننده به ديگر فوايد اين سيستم نيز آشنا باشد. همچنين فنربندي خودرو وظيفه دارد که تا حد ممکن چرخ هاي خودرو را به زمين بچسباند. در سيستم تعليق ايستا هيچ منبع انرژي بيروني وجود نداشته و اين سيستم تنها توانايي بازيابي و ميرايش انرژي را دارد. بنابراين اثرات ناخواسته و ناراحت کننده حرکات غلتش بدنه در هنگام چرخش خودرو، کله زدن بدنه در هنگام شتاب گيري و ترمزدهي، بلند شدن و جابه جايي ماناي بدنه نسبت به سيستم تعليق در هنگام چرخش پايدار خودرو و . هيچگاه از بين نمي رود. از آنجا که در اين سيستم منبع انرژي بيروني وجود ندارد، بنابراين ساده، ارزان و قابل اعتماد است. در بيشتر اين سيستم ها مقادير سختي فنر و ميرايي لرزه گير ثابت بوده و با برگزيدن ضرايب مناسب و کاهش بلندي گرانيگاه خودرو مي توان به کيفيت خوش سواري و فرمان پذيري خوبي دست يافت. فنر نرم بر واکنش شتاب گيري، ترمز گيري و چرخش خودرو تاثيرات منفي دارد.
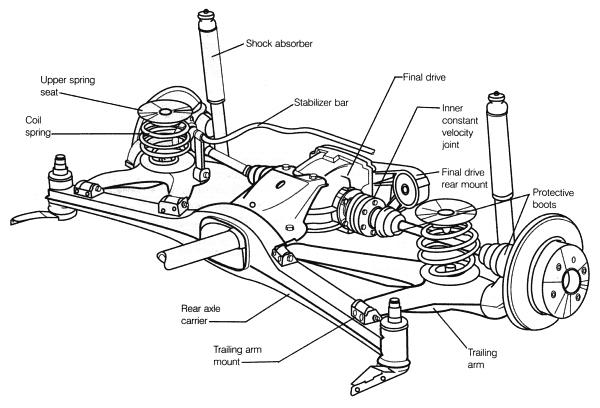
هدف اين پروژه بررسي سيستم تعليق خودرو براي بدست آوردن بهترين شرايط کنترلي و پايداري سيستم مي باشد تا نهايتا خروجي مطلوب حاصل گردد. البته دليل عمده و هدف اصلي انتخاب اين پروژه اهميت سيستم تعليق در راحتي و آسايش سرنشينان خودرو در مقابل ناهمواري ها که به صورت اغتشاشات عملکرد سيستم تعليق را تحت تاثير قرار مي دهد بوده است و خواسته يک مهندس کنترل نيز جدا از اين موضوع نيست.

پروژه سيستم تعليق خودرو براي يک چرخ، مشتمل بر 29 صفحه، تايپ شده، به همراه دستورات MATLAB و تصاوير، با فرمت pdf به ترتيب زير گردآوري شده است:

جهت دانلود پروژه سيستم تعليق خودرو براي يک چرخ، به لينک زير مراجعه نماييد:
در اين پروژه براي مدل تابع تبديل کنترل کلاسيک، کنترل مدرن و کنترل بهينه در دو حالت زمان پيوسته و زمان گسسته طراحي شده است. ابتدا کنترل PID پيوسته طراحي شده و سپس PID ديجيتال و سپس رفتار سيستم نسبت به دو حالت مقايسه شده و در مرحله بعد کنترل فيدبک حالت و مشاهده گر و کنترل فيدبک با مشاهده گر طراحي شده و همچنين حالت هاي سيستم را با مشاهده گر مقايسه شده اند و تاثير نويز و تغيير پارامتر ها روي رفتار سيستم بررسي شده است. سپس کنترل فيدبک حالت زمان گسسته، مشاهده گر آن و کنترل فيدبک حالت زمان گسسته همراه با مشاهده گر طراحي شده اند و حالت هاي سيستم را با مشاهده گر مقايسه شده اند. اثر نويز و تغيير پارامترها را روي اين طراحي ها بررسي شده است و در آخر کنترل فيدبک حالت بهينه با تابع هزينه دلخواه طراحي شده است و رفتار سيستم با اين طراحي را در حضور نويز بررسي شده است. نتيجه اي که گرفته ايم اين است که کنترل PID در حذف نويز از ساير طراحي ها موفق تر بوده و کنترل فيدبک حالت نسبت به تغيير پارامترهاي سيستم مقاوم تر بوده و از نظر سرعت رسيدن به حالت مانا، SVFC سريع ترين پاسخ را داشته است.
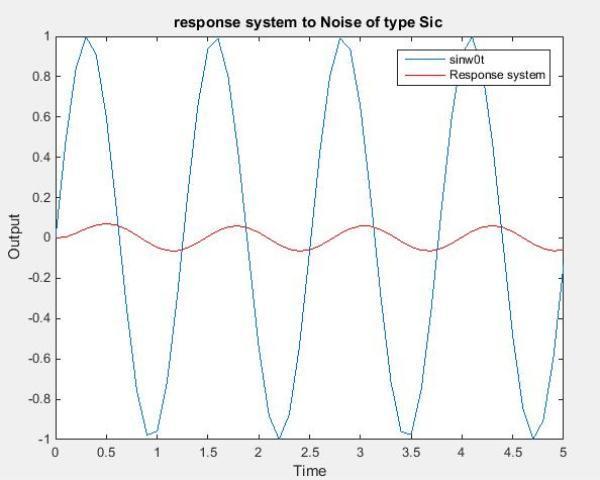
پروژه طراحي کنترلر کلاسيک، کنترل مدرن و کنترل بهينه براي مدل تابع تبديل در حالت هاي زمان پيوسته و زمان گسسته و مقايسه آنها در محيط کد نويسي در MATLAB، مشتمل بر 57 صفحه، تايپ شده، به همراه روابط رياضي و تصاوير با فرمت pdf جهت دانلود قرار داده شده و به ترتيب زير گردآوري شده است:

جهت دانلود پروژه طراحي کنترلر ، کنترل مدرن و کنترل بهينه براي مدل تابع تبديل در حالت هاي زمان پيوسته و زمان گسسته و مقايسه آنها در محيط کد نويسي نرم افزار Matlab به لينک زير مراجعه نماييد:

درباره این سایت